(unity) Quaternion.RotateTowards doesn't seem to work as I imagine it to?

I'm trying to get something like this going:
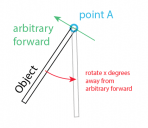
Given point A, given a transform with an arbitrary forward (it can turn), and given the starting position of an object anchored at point A, I want to rotate that object away from the forward. I googled around and found Quaternion.RotateTowards, which seemed right:
Object.MoveRotation(Quaternion.RotateTowards(Quaternion.Euler(Object.x, Object.y, Object.z), pointA.rotation, x));
But after testing it out, it doesn't actually do what I want it to do, the resulting angle changes according to how bit x is, if it's close to zero, it basically becomes the same as the original Object.x, if it's positive high, it replicates the forward, if it's negative, it seemingly goes randomly. Am I using it correctly?
Is there an easier way to achieve something like this?? (In 3D, not 2D)
Given point A, given a transform with an arbitrary forward (it can turn), and given the starting position of an object anchored at point A, I want to rotate that object away from the forward. I googled around and found Quaternion.RotateTowards, which seemed right:
Object.MoveRotation(Quaternion.RotateTowards(Quaternion.Euler(Object.x, Object.y, Object.z), pointA.rotation, x));
But after testing it out, it doesn't actually do what I want it to do, the resulting angle changes according to how bit x is, if it's close to zero, it basically becomes the same as the original Object.x, if it's positive high, it replicates the forward, if it's negative, it seemingly goes randomly. Am I using it correctly?
Is there an easier way to achieve something like this?? (In 3D, not 2D)
Screenshot 2019-02-10 at 08.11.19.png
421 x 365 - 30K
Comments
Quaternion.LookRotation() – Points the Z-axis in a direction
Quaternion.SetFromToRotation() – From one direction to another
Quaternion.RotateTowards() – Match rotation
It sounds like you want Quaterion.SetFromToRotation?
Also, I'm unsure of what the "to" direction is, and therefore I thought RotateTowards would work as it is theoretically "rotate towards a target but stop when you've rotated x degrees", which seems like what I want. I don't know the exact target but I do know the target I want to rotate towards and how many degrees i want to rotate it towards by (not all the way).
Of course if Object's pivot was at point A to start with then it does not need to have the parent to act as anchor.
But maybe I am not understanding the question correctly.
So you can get the world rotation to your target with:
Quaternion Rot = Quaternion.LookRotation(Target.position - transform.position, Vector3.up);
then alter the rotation using something like:
Quaternion Offset_Rot = Rot * Quaternion.euler(0f,somedegreesinY,0f);
@Blackson I know the target's physical location in space that I want to rotate towards, not sure if that's what you mean?
I can't just pick one set of degrees and ignore X and Z as I'm moving in 3D space and not just 2D.
nvm, I see you made a new post with more info about this.
Quaternion TargetRot = Quaternion.LookRotation(Target.position - transform.position, Vector3.up);
(that gives you the final target rotation)
Then lerp the rotation of the object that must look with:
transform.rotation = Quaternion.Lerp(transform.rotation,TargetRot,Time.deltatime*rotation speed);